【RobotStudio6.08破解版】RobotStudio破解版下载 v6.08 官方正式版
软件介绍
RobotStudio6.08破解版是一款十分专业的机器人仿真编程软件,RobotStudio能够在用户的电脑上制作生成一个虚拟的机器人,帮助用户进行一些智能化和自动化的操作,不仅能够大大提升生产率,而且还能够有效的去降低成本,尝尝被用于企业生产、教育培训等等行业。
RobotStudio破解版经过完美特别,内置安装激活码,用户只需下载解压即可直接使用,RobotStudio6.08版本也是公认的最好用的版本,兼容32位以及64位的操作系统,支持导入CAD模型,十分强大。
RobotStudio6.08破解版功能介绍
【CAD导入】
RobotStudio可方便地导入各种主流CAD格式的数据,包括IGES、STEP、VRML、VDAFS、ACIS及CATIA等。机器人程序员可依据这些精确的数据编制精度更高的机器人程序,从而提高产品质量。
【AutoPath】
RobotStudio中最能节省时间的功能之一。该功能通过使用待加工零件的CAD模型,仅在数分钟之内便可自动生成跟踪加工曲线所需要的机器人位置(路径),而这项任务以往通常需要数小时甚至数天。
【程序编辑器】
程序编辑器(ProgramMaker)可生成机器人程序,使用户能够在Windows环境中离线开发或维护机器人程序,可显著缩短编程时间、改进程序结构。
【路径优化】
如果程序包含接近奇异点的机器人动作,RobotStudio可自动检测出来并发出报警,从而防止机器人在实际运行中发生这种现象。仿真监视器是一种用于 机器人运动优化的可视工具,红色线条显示可改进之处,以使机器人按照最有效方式运行。可以对TCP速度、加速度、奇异点或轴线等进行优化,缩短周期时间。
【Autoreach】
Autoreach可自动进行可到达性分析,使用十分方便,用户可通过该功能任意移动机器人或工件,直到所有位置均可到达,在数分钟之内便可完成工作单元平面布置验证和优化。
【虚拟示教台】
是实际示教台的图形显示,其核心技术是VirtualRobot。从本质上讲,所有可以在实际示教台上进行的工作都可以在虚拟示教台(QuickTeach?)上完成,因而是一种非常出色的教学和培训工具。
【事件表】
一种用于验证程序的结构与逻辑的理想工具。程序执行期间,可通过该工具直接观察工作单元的I/O状态。可将I/O连接到仿真事件,实现工位内机器人及所有设备的仿真。该功能是一种十分理想的调试工具。
【碰撞检测】
碰撞检测功能可避免设备碰撞造成的严重损失。选定检测对象后,RobotStudio可自动监测并显示程序执行时这些对象是否会发生碰撞。
【Visual Basic for Applications (VBA)】
可采用VBA改进和扩充RobotStudio功能,根据用户具体需要开发功能强大的外接插件、宏,或定制用户界面。
【PowerPac's】
ABB协同合作伙伴采用VBA进行了一系列基于RobotStudio的应用开发,使RobotStudio能够更好地适用于弧焊、弯板机管理、点焊、CalibWare(绝对精度)、叶片研磨以及BendWizard(弯板机管理)等应用。
【直接上传和下载】
整个机器人程序无需任何转换便可直接下载到实际机器人系统,该功能得益于ABB独有的VirtualRobot技术。
软件特色
1、有效降低风险
2、投产更迅速
3、换线更快捷
4、生产效率提高
5、适用于多个不同的行业
安装教程
首先在本页面下载RobotStudio6.08破解版文件包,然后解压缩,获得安装程序
双击setup开始安装,选择安装语言为中文,继续安装
用户可以自定义软件的安装目录,选择目录后继续安装
选择安装类型,然后下一步继续安装
耐心等待完成安装即可。
RobotStudio6.08破解版特别教程
打开注册表,找到HKEY_LOCAL_MACHINE--SOFTWARE---Wow6432Node--Microsoft--SLP Services 这是电脑是64位的位置。
然后在右侧找到NoLockData键。双击NoLockData键,打开一个面板,里面的数据都是十六进制的选择表中倒数第6行中的D3,修改为FF,按确定后刷新注册表,重新打开Robotstudio后可以看到试用期延长。
使用教程
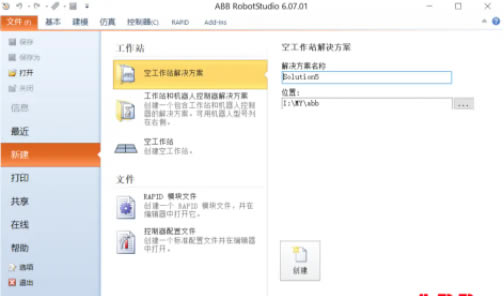
1、建空工作站解决方案,右边有文件默认存放位置,可自行更改存放位置,但也不能有中文目录。
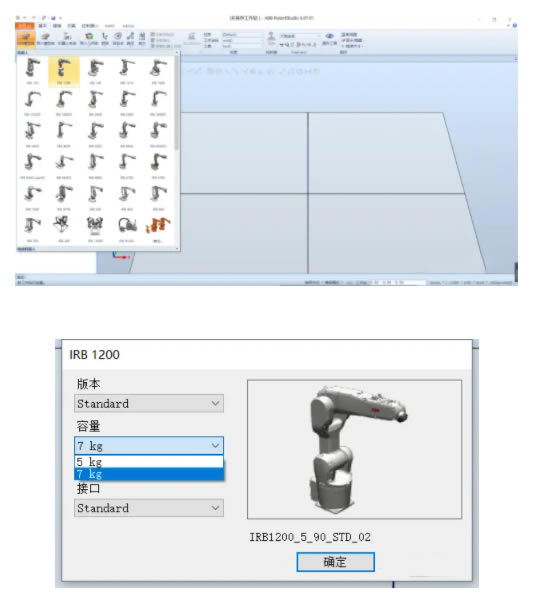
选择需要使用的机器人,并选择对应的负载容量。
2、因为是软件模拟,所以不需要加入控制器(在软件中控制柜没有实际效果,实际中起到控制作用)。
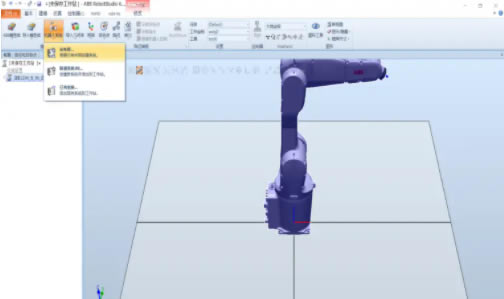
3、机器人需要安装机器人系统,因为是软件模拟,所以需要手动创建系统。
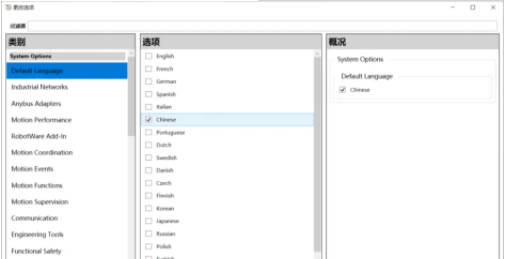
4、基本--》机器人系统--》从布局--》下一个--》下一个--》选项
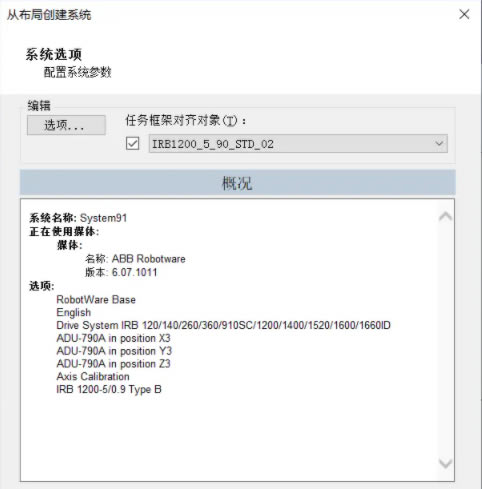
选择Default Language--》Chinese(把示教器的语言改成中文界面)
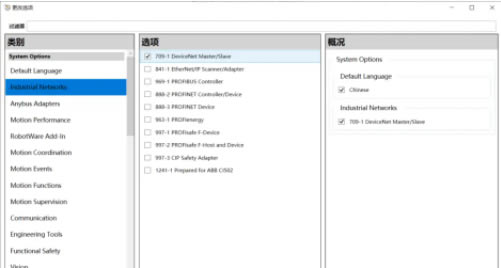
选择Industrial Networks--》709-1 DeviceNet Master/Slave(添加DeviceNet通讯方式,这个是机器人IO板的通讯方式)
点击确定,这时候机器人就创建完成了。
5、软件快捷键:
视角平移(Ctrl+左键)
缩放(滚轮)
工作站三维视角旋转(Ctrl+shift+左键)
……
点击下载编程软件 >>本地高速下载
点击下载编程软件 >>百度网盘下载